Anmerkung: Die Zeichnung entstammt dem aktuellen SIEMENS-AMS, d.h. Anfang der 80er Jahre gab es natürlich noch kein 32Bit-PCI.
Allgemeines
Die elektrischen Eigenschaften
Die Realisierung des MMS-16
Allgemeines
Anfang der 80er Jahre war der K1520-Standard in Form des gleichnamigen universellen Steckkartensystems von ROBOTRON trotz des hohen Preises weit verbreitet. Mit Aufkommen der 16-Bit-Technik galt es ebensolches auch dafür zu schaffen.
Zunächst sah sich ROBOTRON wieder in der Pflicht, aber in den Abstimmungen mit den Mikroelektronik-anwendenden Betrieben und Kombinaten wurde schnell klar, daß es diesmal nicht mehr so einfach werden würde, einen einheitlichen Standard zu vereinbaren.
Das Problem ging schon damit los, daß man sich nicht auf einen Mikroprozessortyp einigen konnte. Während ROBOTRON die Weiterentwicklung der INTEL-Linie mit dem 16-Bit Mikroprozessor 8086 favorisierte, kamen aus der nun recht erstarkten Automatisierungs-Industrie (z.B. Numerik, KAAB) Bestrebungen die Weiterentwicklung der ZILOG-Linie mit dem Z8000 durchzusetzen. Während der im K1520 eingesetzte Z80-Nachbau noch halbwegs abwärtskompatibel mit dem 8080 von INTEL war, gab es dieses bei den 16-Bit-Prozessoren nicht mehr. Wollte man beide Mikroprozessor-Systeme im neuen MMS-16 einsetzen, mußte das Bussystem so universell gestaltet sein, daß dieses möglich sein konnte.
Hinzu kam noch die Forderung vom DDR-Außenhandel, daß man nur noch Rechner und Steuerungen auf dem Weltmarkt verkaufen kann, wenn diese auf Basis internationaler Standards gebaut sind. Das war z.B. beim K1520 nicht der Fall.
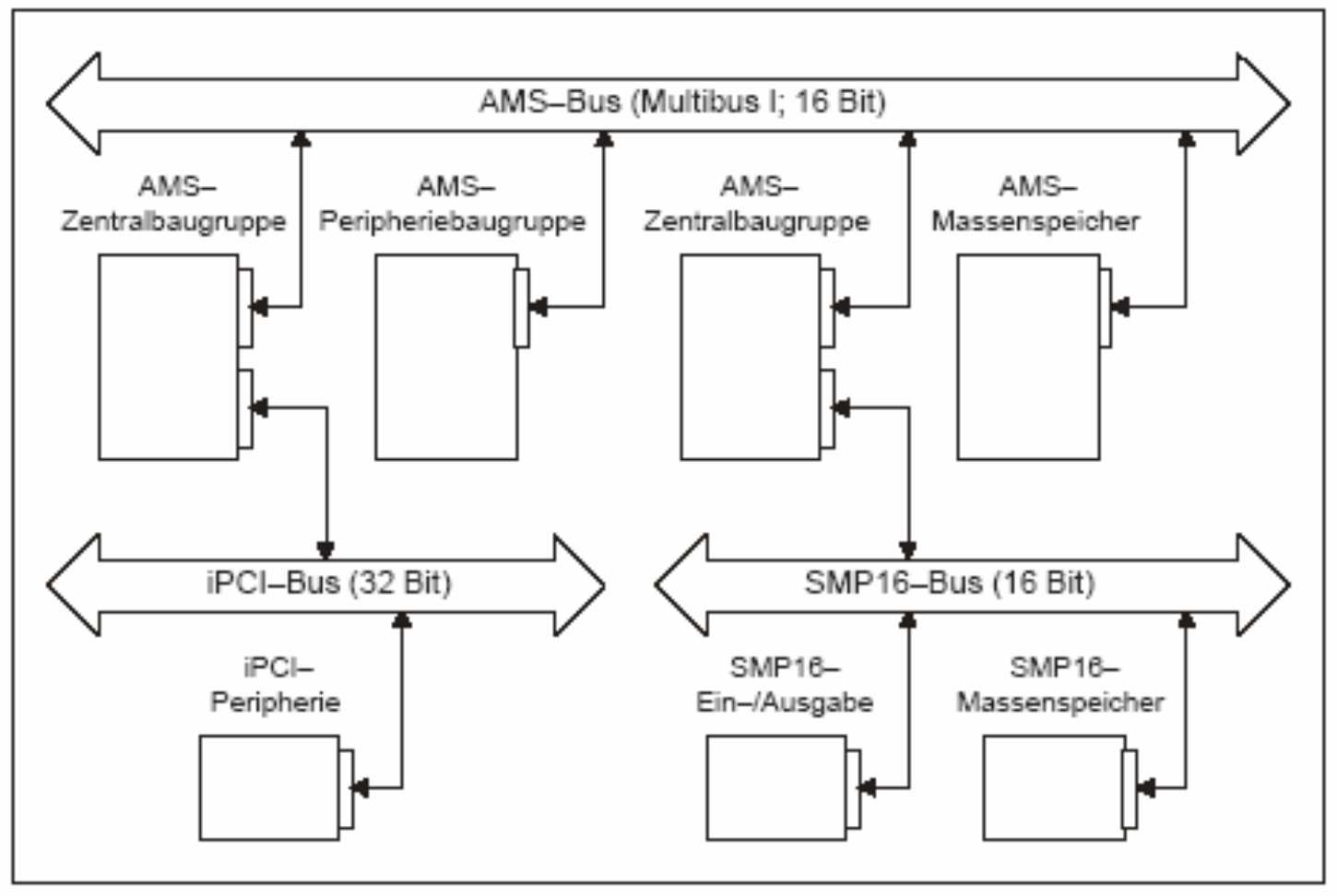
Einer der führenden und Standard-bestimmenden Hersteller von Industrierechnern und mikroelektronischen Steuerungen war damals schon die BRD-Firma SIEMENS. Von SIEMENS wurde etwa zur gleichen Zeit, bzw. kurz zuvor ein neues modulares Steuerungs-System eingeführt, welches auf Basis des 16-Bit Mikroprozessors 8086 von INTEL aufgebaut war. Das dazu gehörende Bussystem war auf der Grundlage des von INTEL zum 8086 entwickelten "Multibus-I" entstanden und wurde von SIEMENS "AMS-Bus" (Advanced Microcomputer System) genannt *). Der AMS-Bus hatte den entscheidenden Vorteil, daß er multimasterfähig war, d.h. die Möglichkeit bot, am gleichen Bus mehrere CPUs arbeiten zu lassen. Das ursprünglich von INTEL kreierte "Multibus-I" ist von der internationalen IEC-Kommision zum weltweiten Standard unter dem Titel IEC 796 erhoben worden. Die heute noch für mehrere hundert Doller zu erwerbende IEC-796-Spezifikation **) wurde von SIEMENS auf das vorteilhaft eingeführte Konzept im Doppeleuropa-Kartenformats mit indirekten Steckverbindern angepaßt, ohne die elektrischen Parameter wesentlich zu verändern.
Die elektrische Eigenschaften
Die elektrischen Eigenschaften des AMS-Busses sind insbesondere durch eine 3-Ebenen-Architektur gekennzeichnet:
- der AMS-Systembus (16 Bit parallel),
- der lokale Erweiterungsbus (8/16 Bit parallel),
-
Außerdem ist es möglich - wie schon erwähnt - in Folge der Multimasterfähigkeit bis zu 16 CPU-Baugruppen im System zu betreiben.
Anmerkung: Die Zeichnung entstammt dem aktuellen SIEMENS-AMS, d.h. Anfang der 80er Jahre gab es natürlich noch kein 32Bit-PCI.
AMS-Systemdaten
| Systemkonfiguration | Multi–Master–System, max. 16 Bus–Master–Baugruppen möglich |
| Systembus | asynchron, getrennter Daten– und Adreßbus |
| Transferrate | > = 10 MByte/s |
| Steckplätze | max. 21 pro 19–Zoll–Systemrack |
| Datenbreite | 16 Bit |
| Adreßräume | 16 MByte Speicheradressen, 64 KByte Ein–/Ausgabeadressen |
| Interrupt–System | abhängig von verwendeter Bus–Master–Baugruppe |
| Kommunikation zwischen Bus–Mastern | über onboard–Dual–Port–RAM |
| Baugruppenkonfiguration | mit Wrap–Brücken, mit lokalen Registern |
| Kopplungsmöglichkeiten mit anderen Bussen | SMP16, iPCI |
| Stecksystem | indirekt, 96polig nach DIN 41612 |
| Versorgungsspannungen | +5 V, ±5 % +3,3 V, ±5 % (optional) ±12 V, ±5 % (optional) ±15 V, ±3 % (optional) |
Eine ausführliche Beschreibung der einzelnen Bus-Signale, sowie deren Belegung auf den AMS-Bus-Steckverbinder (siehe Tabelle "AMS-Systemdaten") kann in der u.a. Literatur nachgelesen werden.
Die Realisierung des MMS-16
Beim MMS-16 wurde - abweichend von dem in der DDR weit verbreiteten K1520-Format 170x315mm - das SIEMENS-Steckkartenformat in originaler Größe
160x233,35mm verwendet. Da das im K1520 eingesetzte EFS-Steckverbindersystem
87-polig nicht ausreichend war und Kompatibilität zum Vorbild hergestellt
hergestellt werden sollte, mußte auch der originale 96-polige Steckverbinder C96 C1A nach DIN 41612 - Hersteller z.B. ITT - eingesetzt werden. Glücklicherweise wurde gerade dieser in Lizenz von der
polnischen Firma "ELTRA" gefertigt, so daß ein Import ohne Einsatz von
NSW-Valuta - die ja immer sehr knapp waren - möglich gewesen ist.
Die im AMS = MMS-16 verwendete Steckerbelegung ist in "Systembus-Belegung MMS-16" aufgeführt. Bezüglich der Steckerbelegung beim Multibus I ist bei Mark Sokos außerdem nachzulesen, daß es sich hierbei um einen zweireihigen 86-poligen Steckverbinder handelt, mit einer völlig anderer Belegung im Vergleich zum AMS-Bus.
Eine "Kurzbeschreibung MMS-16" und die nachfolgende Systemübersicht 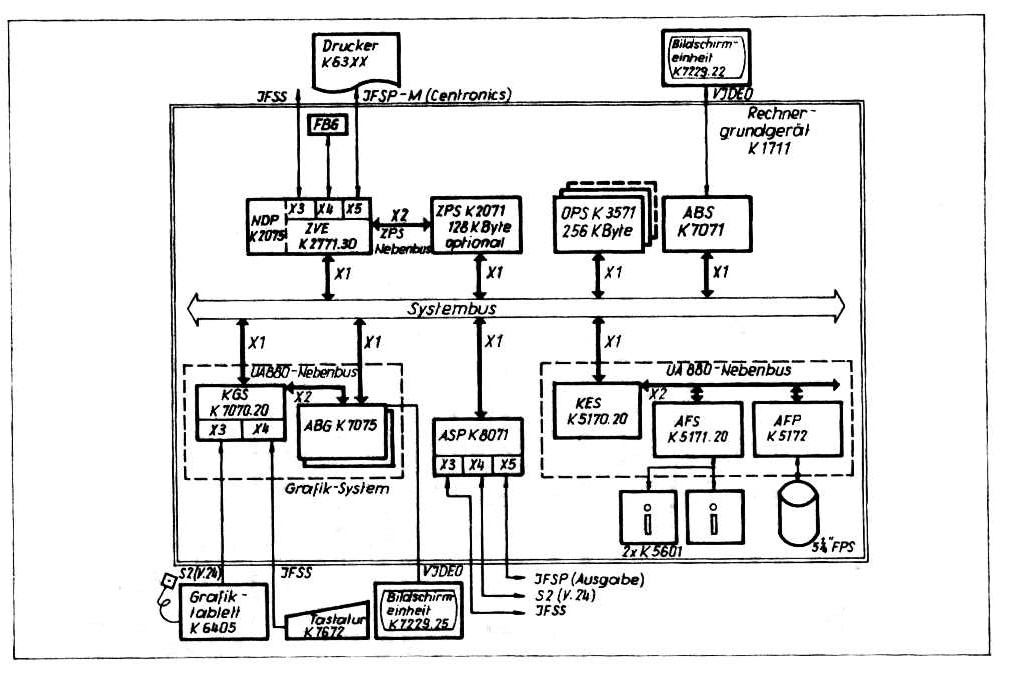 sind auszugsweise der Betriebdokumentation der Arbeitsplatz-Computers A 7150 von ROBOTRON entnommen (s.u.).
Ein großer Teil dieser so wichtigen Unterlagen befinden sich gut behütet in den Technischen Sammlungen Dresden .
Einige grundlegende Hinweise gab es allerdings in dem schon bekannten Zeitschriftenartikel in "edv-aspekte"- (s.u.), dessen Kurzfassung "hier" bereits veröffentlicht wurde.
sind auszugsweise der Betriebdokumentation der Arbeitsplatz-Computers A 7150 von ROBOTRON entnommen (s.u.).
Ein großer Teil dieser so wichtigen Unterlagen befinden sich gut behütet in den Technischen Sammlungen Dresden .
Einige grundlegende Hinweise gab es allerdings in dem schon bekannten Zeitschriftenartikel in "edv-aspekte"- (s.u.), dessen Kurzfassung "hier" bereits veröffentlicht wurde.
Für eine genauere Beschreibung der einzelnen Systemsignale sei auf die angegebenen Literaturstellen z.B. bei SIEMENS verwiesen. Zum Timing der einzelnen Systemsignale - so, wie etwa beim K1520-Standard - werden allerdings auch dort leider keine Angaben gemacht. Es gibt zwar eine grobe Darstellung bei Mark Sokos (s.u.) und sicherlich eine ausführliche im Multibus-Handbook von INTEL, bzw. in der u.a. Literaturquelle. Aber die sind heute leider nicht mehr verfügbar.
Resümierend kann festgestellt werden, daß eine umfassende Darstellung in Form eines Standards wie beim K1520 beim MMS-16 offensichtlich nicht vorhanden ist. Es existiert lediglich ein vager Hinweis auf eine nicht näher bezeichnete "Systembus-Richtlinie", die aber wohl nicht mehr aus dem Hause ROBOTRON kam, da dort bereits ab ca. 1986 die Verantwortlichkeiten zum MMS-16 an KAAB, bzw. EAW abgegeben wurde. Das hing wiederum mit der Entwicklung der neuen Computerlinie (z.B. EC1834) zusammen, die nicht mehr als reines Steckkartensystem, sondern basierend auf einem Motherboard konzipiert wurde. Somit war das universelle MMS-16-System für ROBOTRON nicht mehr von Bedeutung.
Die Systembus-Beschreibungen "Multibus" und "AMS-Bus" beziehen sich alle auf das 16-Bit-Mikroprozessorsystem 8086 von INTEL. Unklar ist deshalb weiterhin, wie es den DDR-Ingenieuren gelang, auch das U8000- (= Z8000 von Zilog) Prozessorsystem in das MMS-16 zu integrieren. Dazu sind bis dato leider keinerlei Dokumente aufzutreiben gewesen. Vielleicht gibt es noch den einen oder anderen "Insider" aus der Automatisierungs-Industrie, wie z.B. "Numerik Karl-Marx-Stadt", oder "KAAB" bzw. "EAW-Berlin", die hierbei mit bisher noch unbekannten Unterlagen helfen können.
Für den technisch interessierten Leser, der sich auch eingehender mit der Problematik des 16-Bit-Mikroprozessorsystems 8086 auseinander setzen wollte, gab es ein recht ausführliche Buch von Bäurich-Barthold (s.u.).
Kompakt und damit recht übersichtlich, mit anschaulichen Schaltbeispielen und Timing-Darstellungen war auch der mehrteilige MP-Kurs "Mikroprozessorsystem K1810WM86" - d.h. das 8086-Äquivalent aus der UdSSR (s.u).
Dieses liegt in gescannter Form vor.
SIEMENS Systemhandbuch SICOMP IMC Industrielle Microcomputer, Ausgabe 09.98, 244 Seiten, Best.-Nr. 6AR1950–7AA00–1CA0 - (Abschnitt AMS-Bus)
SIEMENS AMS-AT-Zentralbaugruppe Technische Beschreibung, Ausgabe 1/1996, 116 Seiten, Best.-Nr. 6AR1930-0AA03-1AA0
SIEMENS AMS-M351 Produktbegleitbrief für Massenspeicher-Baugruppe für SICOMP AMS-Systeme, Betriebshinweise, 6 Seiten
SIEMENS AMS-M431-A5 Produktbegleitbrief Stromversorgung, 2 Seiten
SIEMENS AMS-M551 Technische Beschreibung AMS-Systemrahmen, Ausgabe 5/2000, Best.-Nr. 6AR1950-3AA00-1AA0, 8 Seiten
SIEMENS AMS-M551 Produktbegleitbrief Lüftermodul, 5 Seiten
INTEL Corp.: "µP- and Peripheral Handbook", 1983
Mark Sokos: MULTIBUS I (Kurzbeschreibung in englisch, Quelle: Internet)
ROBOTRON - Betriebsdokumentation zum A7150 - Hardware, 1.56.700613.8/97
Siegfried Kerst, Harald Riegel: "Arbeitsplatzcomputer Robotron A7100", EDV-Aspekte 1987, H1, S 2-17
Dr. Heiz Bäurisch, Hans Barthold: Einführung in die 16-Bit-Mikrorechentechnik mit dem K1810WM86, Militärverlag der DDR, 1988
Prof. Dr. Bernd-Georg Münzer, u.a.: Mikroprozessorsystem K1810WM86, Kurs in der Zeitschrift "Mikroprozessortechnik", 1988, H2, S45-52; H5, S141-148; H8, S237-244; H10, S303-306; H12, S365-372; 1989, H14, S109-116
Sollte es aus der interessierten Leserschaft diesbezügliche Hinweise auf notwendige Korrekturen oder Ergänzungen geben, so werden diese sehr gern angenommen und eingearbeitet.